A. Purczyński
Synteza i analiza kinematyczna mechanizmu łącznika elektroenergetycznego
1.Wprowadzenie
W budowie łączników elektroenergetycznych szerokie zastosowanie znalazły mechanizmy dźwigniowe. Większość z tych mechanizmów stanowią pochodne czworoboku przegubowego, który pozwala na spełnienie wielu różnorodnych warunków ruchu. Rysunek 1 przedstawia przykład wykorzystania przekładni czworobokowej w budowie odłącznika SN [4].

Rys. 1. Odłącznik SN i jego układ kinematyczny
W projektowaniu aparatów elektroenergetycznych warunki te zwykle dotyczą:
- odstępów izolacyjnych, które muszą wytrzymywać długotrwale najwyższe wartości napięć roboczych i krótkotrwale wartości odpowiednich napięć probierczych;
- odstępów między stykami, wynikających z konieczności zapewnienia optymalnego gaszenia łuku;
- trajektorii styków ruchomych, które mogą być prostoliniowe, kołowe lub płaskie złożone;
- przyspieszeń, których maksymalne wartości decydują o wielkościach sił bezwładności działającycc na poszczególne ogniwa mechanizmów;
- prędkości w poszczególnych punktach drogi styków, które najczęściej określa się w położeniu utraty styczności styków dla otwierania i prędkości w położeniu uzyskania styczności dla operacji zamykania. Stosuje się również odnoszenie prędkości do położenia styków po czasie równym jednemu okresowi przebiegu o częstotliwości 50 Hz.
 Rys. 2. Krzywe łącznikowe |
Analiza kinematyczna wybranych wariantów mechanizmu obejmuje opracowanie charakterystyk czasowych drogi styku ruchomego, jego prędkości, przyspieszenia i przełożenia. Charakterystyki te stanowią podstawę do przeprowadzenia analizy dynamicznej przy projektowaniu mechanizmu łącznika elektroenergetycznego.
2. Metoda pomiarów
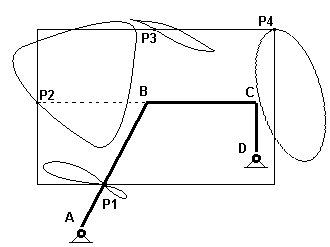
Do badań mechanizmu prostowodowego opartego na przekładni czworobokowej z przedłużonym łącznikiem wykorzystano prosty model listewkowy (rys. 4). Podobny model był np. wykorzystywany przy opracowywaniu schematu kinematycznego bieguna wyłącznika małoolejowego [1]. Model ten jest przydatny nie tylko do określenia odpowiedniego czworoboku przegubowego i wyznaczenia jego położenia na płaszczyźnie, ale także w prosty sposób pozwala na wyznaczenie obszaru zajmowanego przez ogniwa przekładni podczas przestawiania styku ruchomego.Zadanie postawione w ćwiczeniu polega na wyznaczeniu czworoboku przegubowego realizującego tor możliwie prostoliniowy na drodze punktu C. Rozwiązanie zadania wymaga określenia dziewięciu parametrów (cztery długości ogniw, trzy – położenie ostoi na płaszczyźnie i dwa – położenia punktu C względem mechanizmu łącznika). Sposób wyboru najlepszego rozwiązania wymaga odwołania się do ustaleń związanych z prostowodem dokładnym (rys. 3). Jest on oparty na mechanizmie korbowo-wodzikowym. Postępowanie polegające na sprawdzaniu wszystkich możliwych wariantów na modelu jest niecelowe, gdyż pozwala on na wykonanie 3072 różnych układów. Schemat prostowodu dokładnego przedstawia rysunek 3.
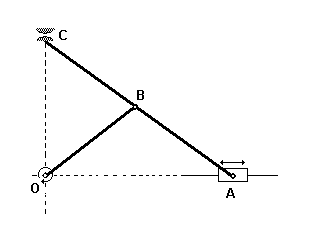 Rys. 3. Prostowód dokładny |
AB = BC = BO
Wadami takiego rozwiązania są :
- przecinanie się trajektorii z osią wału napędzającego O;
- stosunkowo duże tarcie w węźle posuwisto-zwrotnym A.
3. Sposób przeprowadzenia pomiarów
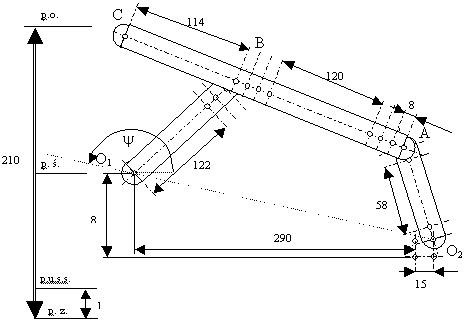
Zmieniając długość ogniw i położenie wału O2 należy sprawdzić trajektorie punktu C. Na tej podstawie ustalić schemat kinematyczny czworoboku dla którego punkt C będzie zakreślał krzywą najbardziej zbliżoną do prostej. Dla wybranego wariantu trajektorii odchylenie nie powinno być większe niż ?2 mm. Tor ten należy wykreślić na papierze milimetrowym podłożonym pod pisak związany z punktem C. Równocześnie można otrzymać charakterystykę kinematyczną punktu C:sc = f(φO1) Gdzie:
sc – droga punktu C;
φO1 – kąt zakreślany przez korbę wokół punktu O1.
W tym celu należy wyznaczyć położenie punktu C w przerwie międzystykowej zmieniając kąt φ co 10°.
Wyniki syntezy mechanizmu prostowodowego i pomiarów jego charakterystyki kinematycznej zestawić w tablicy 1.
Tablica 1
| Synteza wymiarowa schematu kinematycznego | Charakterystyka kinematyczna | ||||
|---|---|---|---|---|---|
| Długości ogniw | Położenie ostoi | Położenie pkt.C wzgl. łącznika | Lp. | φ [°] | sc [mm] |
| O1O2 | (O1O2)x | (CB)x | 1. | ||
| O1/SUB>B | (O1O2)y | (CB)y | 2. | ||
| O2A | Ψ | 3. | |||
| AB | 4. | ||||
(...)x – odległość mierzona wzdłuż osi odciętych;
(...)y – odległość mierzona wzdłuż osi rzędnych;
Ψ - kąt jaki tworzy ostoja z osią odciętych.
4. Opracowanie wyników pomiarów
Na podstawie wyników uzyskanych z badań należy wykreślić charakterystykę kinematyczną sc = f(φO1). Dla danej stałej prędkości obrotowej wału korby wyznaczyć graficznie prędkości punktu C w czterech położeniach: otwarcia (p.o.), środkowym (p.ś.), uzyskania /utraty styczności styków (p.u.s.s.) i położenia zamknięcia (p.z.). Należy wykorzystać do tego celu metodę biegunowych planów prędkości. Dla tych samych czterech położeń styku ruchomego i stałej prędkości kątowej obliczyć stosunek prędkości styku do prędkości końca ogniwa O1B/(vB).Wyniki zestawić w tablicy 2 i przedstawić w formie wykresów vc=f(φO1) i vc/vB = f(φ)01).
Tablica 2
| Położenie | φO1 [°] | vc [m/s] | vC/vB |
|---|---|---|---|
| p.o. | |||
| p.ś. | |||
| p.u.s..s. | |||
| p.z. |
 Rys. 4. Prostowód listewkowy |
W ćwiczeniu wykorzystuje się nowszą wersję prostowodu z ułatwioną regulacją długości dźwigni i nastawianiem kątów obrotu.
4. Literatura
- Maksymiuk J.: Modelowanie w procesie projektowania mechanizmów łączników elektroenergetycznych, mat. II Konf. Nt. Metody badań łączników niskonapięciowych, Łódź 1977 s. 142-145
- Maksymiuk J.: Mechaniczna teoria łączników elektrycznych, WNT Warszawa 1967
- Parszewski Z.:Teoria maszyn i mechanizmów, WNT Warszawa 1974
- Au A., Maksymiuk J., Pochanke Z.:Podstawy obliczeń aparatów elektroenergetycznych, WNT Warszawa 1976
- Maksymiuk J., Pochanke Z.: Obliczenia i badania diagnostyczne aparatury rozdzielczej, WNT Warszawa 2001