Andrzej Purczyński
1. Oddziaływanie elektrodynamiczne prostoliniowych torów prądowych równoległych
Do obliczeń sił oddziaływania elektrodynamicznego torów prądowych prostoliniowych wykorzystuje się równania Biota - Savarta, Ampera, Lorentza i Maxwella.
Sposoby wyznaczania kierunku oraz zwrotu wektorów indukcji i siły za pomocą dłoni i palców przedstawiono na fotografiach 1 - 4.

Fot. 1. |
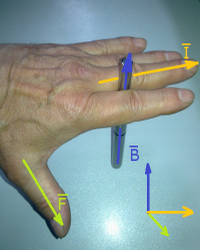
Fot. 2. |
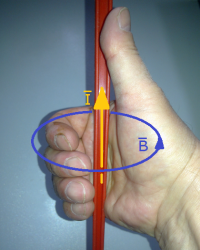
Fot. 3. |
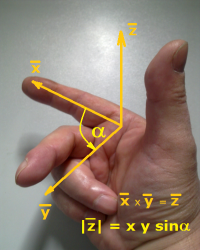
Fot. 4. |
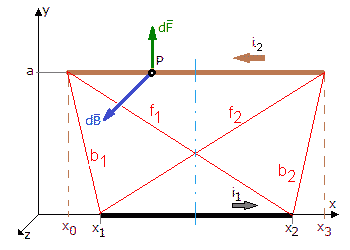
Obliczenia dla dwóch torów prądowych równoległych przeprowadzono w oparciu o poniższy rysunek pomocniczy.
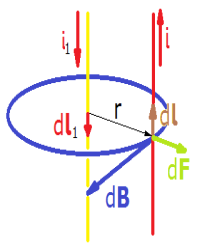
Rys. 1.1. Wyznaczanie kierunku siły | 
Rys. 1.2. Rysunek pomocniczy do obliczeń |
Z równania Biota-Savarta (wzór 1.1) wyznacza się indukcję magnetyczną w punkcie P (rys. 1.2).
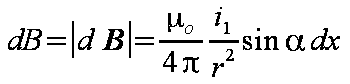 | (1.4) |
|---|
Całkowita indukcja B wymaga całkowania po całej długości toru x.
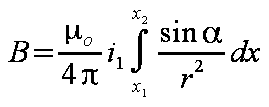 | (1.5) |
|---|
Po zamianie zmiennej x na zmienną α i wyrażeniu długości w kątach od α1 do α2 otrzymuje się równanie przedstawione wzorem 1.7.
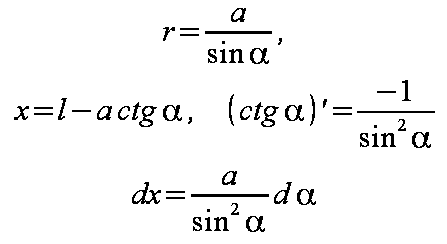 | (1.6) |
|---|
 | (1.7) |
|---|
Wynik całkowania ujmuje wzór 1.8, który jest podstawą dalszych obliczeń siły.
 | (1.8) |
|---|
Po podstawieniu obliczonej indukcji B (wzór 1.8) do wzoru 1.2, otrzymuje się postać wyrażenia na siłę F jak we wzorze 1.9.
 | (1.9) |
|---|
Tym razem wygodniej jest całkować względem zmiennej x, stąd zamiana funkcji kątowych na odpowiednie długości.
 | (1.10) |
|---|
 | (1.11) |
|---|
Wzór 1.12 pokazuje ogólne rozwiązanie całki, takiej jak otrzymana po podstawieniach (wzór 1.11).
 | (1.12) |
|---|
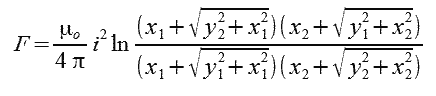
Ostatecznie rozwiązanie przyjmuje postać jak we wzorze 1.13. Dodatkowo można założyć, że prądy są jednakowe i1=i2=i.
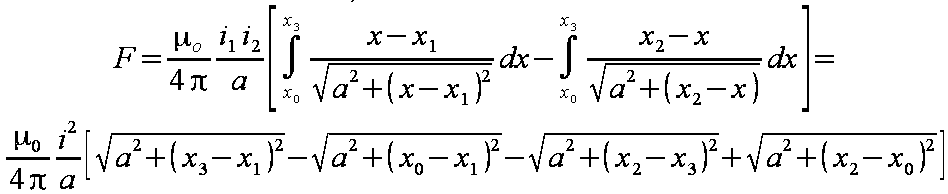 | (1.13) |
|---|
Jeśli przyjąć, że długości obydwu torów są równe i wynoszą l, tzn. x1=x0 oraz x2=x3, to wyrażenie uprości się do postaci wzoru 1.14.
 | (1.14) |
|---|
W przypadku, gdy l jest dużo większe od a (l>>a) wzór 1.14 przyjmie postać wzoru 1.15.
 | (1.15) |
|---|
Po podstawieniu µo=4π · 10-7 i prądu i w kA (103) siła F wyrażona w niutonach może być obliczona z wzoru 1.16.
 | (1.16) |
|---|
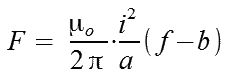
Jeśli do wzoru 1.13 wprowadzimy oznaczenia boków trapezu i przekątnych jak na rysunku 1.3 poniżej, to postać tego wyrażenia będzie łatwa do zapamiętania (wzór 1.17).
Rys. 1.3. Przekątne i boki trapezu opartego na torach prądowych
 | (1.17) |
|---|
W przypadku, gdy przez środki obydwu torów równoległych o różnej długości można przeprowadzić oś symetrii (rys. 3), tzn.: f=f1=f2 oraz b=b1=b2, to równanie określające siłę przyjmie postać wzoru 1.18.
 | (1.18) |
|---|
2. Oddziaływanie elektrodynamiczne prostoliniowych torów prądowych prostopadłych
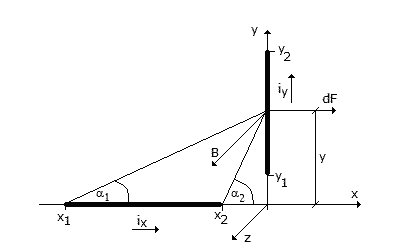
Rys. 2.1. Rozpatrywany model torów prądowych prostopadłych
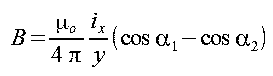
W przypadku torów prostopadłych (rys. 2.1.), jeśli pominie się wpływ przekroju toru indukcja magnetyczna będzie określona wzorem 2.1. (patrz także wzór 1.8)
 | (2.1) |
|---|
Po podstawieniu za cos α1 i cos α2 wymiarów z rysunku 2.1 otrzymuje się wzór 2.2.
 | (2.2) |
|---|
Siłę działającą na ramię y oblicza się z wzoru 2.3 (patrz wzór 1.9).
 | (2.3) |
|---|
W punkcie oddalonym o y działa siła dF (rys. 2.1), której kierunek jest zgodny z osią x (wzór 2.4).
 | (2.4) |
|---|
Całkowitą siłę działającą na prostopadły do osi x odcinek toru, otrzymuje się całkując na wzdłuż tego odcinka od y1 do y2 (wzór 2.5). W dalszych wzorach przyjęto, że prądy w obu odcinkach toru są równe ix= iy= i.
 | (2.5) |
|---|
Całkę oblicza się korzystając z zależności 2.6,
 | (2.6) |
|---|
przy czym v (variable) oznacza zmienną, a c (constant) - stałą.
Najpierw po podstawieniu granic uzyskuje się postać przedstawioną wzorem 2.7:
 | (2.7) |
|---|
Po uproszczeniach zapisu uzyskuje się wzory 2.8 i ostatecznie 2.9.
 | (2.8) |
|---|
 | (2.9) |
|---|
W przypadku gdy tor przebiegający wzdłuż osi x jest bardzo długi (x1 → - ∞, a x2= 0), wtedy cos(α1)=1, a cos(alpha;2)=0 i wzór 2.1 na indukcję uprości się do postaci 2.10.
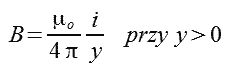 | (2.10) |
|---|
Natomiast siłę działającą na ramię mające kierunek osi y w prosty sposób można wyznaczyć wiedząc, że całka ogólna ma rozwiązanie jak we wzorze 2.11.
 | (2.11) |
|---|
Ostatecznie siła ta jest określona wzorem 2.12.
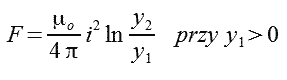 | (2.12) |
|---|
W rzeczywistych torach prądowych (rys. 2.2) należy uwzględnić średnią geometryczną odległość własną przewodu oznaczaną tu: g22.
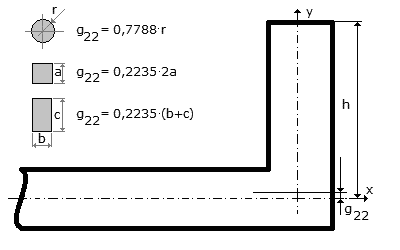
Rys. 2.2. Geometryczna odległość własna przewodu dla różnych przekrojów
Odległość ta zależy od przekroju toru prądowego. Przykładowo dla przekroju kołowego można ją obliczyć z zależności 2.13.
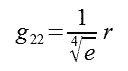 | (2.13) |
|---|
Dla przekroju prostokątnego posługujemy się wartością średnią geometryczną odległością własną przewodu lub wartościami dokładnymi zestawionymi w tablicy 2.1.
Tab. 2.1.
Geometryczna odległość własna
przewodu prostokątnego [1] |
|---|
| c/b | g22/(b+c) |
|---|
| 1,0 | 0,22353 |
| 1,5 | 0,22355 |
| 2,0 | 0,22360 |
| 4,0 | 0,22369 |
| 10,0 | 0,22360 |
| 20,0 | 0,22336 |
| 100,0 | 0,22326 |
Ostateczny wzór na siłę działającą na rzeczywisty odcinek toru prądowego prostopadły do osi x można obliczyć z wzoru 2.14. Przy czym odcinek toru przebiegający wzdłuż osi x musi być znacznie dłuższy od h (rys. 2.2).
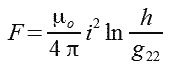 | (2.14) |
|---|
3. Oddziaływanie elektrodynamiczne prostoliniowych torów prądowych ukośnych
Zagadnienie wyznaczania sił w układach ukośnych przedstawiono na przykładzie, z którym można się zapoznać → TUTAJ .
Literatura
- Kurdziel R., Działania cieplne i dynamiczne prądów zwarciowych, PWT Warszawa 1957
- Au A., Ciok Zb., Aparaty elektryczne. Część I, WPW Warszawa 1975
- Au A., Maksymiuk J., Pochanke Zb., Podstawy obliczeń aparatów elektroenergetycznych, WNT Warszawa 1982
- Maksymiuk J., Pochanke Zb., Obliczenia i badania diagnostyczne aparatury rozdzielczej, WNT Warszawa 2001
- Markiewicz H., Wołkowiński K., Urządzenia elektroenergetyczne, WNT Warszawa 1980
- Markiewicz H., Urządzenia elektroenergetyczne, WNT Warszawa 2001
- Baran K., Kutzner J., Zbiór zadań z podstaw elektroenergetyki, Wyd. Ucz. PWSZ Kalisz 2006